Denne gennemgang viser hurtigt hvordan udvalgte eksterne sensorer og aktuatore skal opsættes og kodes til micro:bitten.
Oversigten er en hjælp, hvis man vil lave projekter og kan bruges til at se hvordan de enkelte dele tilkobles micro:bitten.
Omhandlende eksterne sensorer. Sensorer måler noget. Typisk bruges "Analog læs pin".
Sensorer registrer og vil derfor være input.
Afstandssensor - Måler afstand med ultralyd.
En afstandssensor måler afstand med ultralyd. Bruges i projekter hvor man skal registrerer bevægelse indenfor en given afstand, eller projekter hvor man skal måle noget.
Der skal bruges et bibliotek som nemt findes under udvidelser i makeCode og søg på “Sonar”.
Afstandssensoren leverer en 2cm - 400cm berøringsfri måling.
Modulet inkluderer en ultralyds sender, en modtager og en styrekreds.
Måden afstandssensoren grundlæggende fungerer:
Modulet sender otte 40 kHz højniveau signaler og registrerer om en puls signalerer tilbage.
Hvis signalet registreres tilbage er det tiden fra sendt trig signal til modtaget echo signal modulet logger.
Beregningen af afstanden er derfor beregnet ud fra tidsintervallet mellem afsendelse af trigger signal til modtagelse af ekko signal. Formlen er 58 centimeter= tidsintervallet x hastighed(340 M/S) / 2
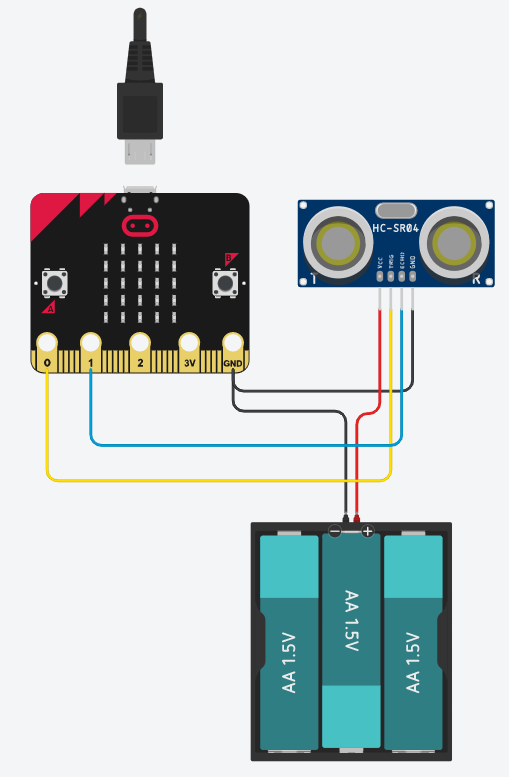
Opsætning:
Da afstandssensoren bruger 5V skal der tilkobles en ekstra 5V batteripakke.
De fire ben:
Vcc - Skal til min 5V.
Trig - Sender et signal svarende til trig-signalet.
Echo - Sender et signal svarende til det modtagne echo-signal
GND - Forbindes til jord.
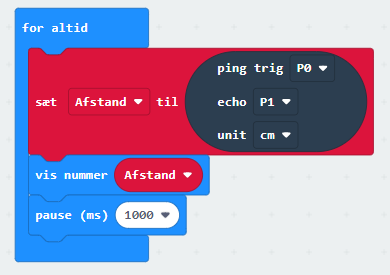
Kodning:
Der skal laves en variabel man selv navngiver på eksemplet er det “Afstand”.
Under udvidelser skal der findes en “Sonar” extension.
En LDR eller lysafhængig modstand bruges til at detekterer lysniveauer. De findes mange steder og bruges for eksempel i automatiske sikkerhedslys.
Deres modstand falder, når lysintensiteten øges.
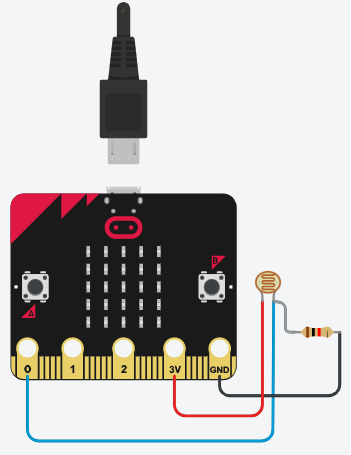
Opsætning:
Modstanden på billedet er 1KΩ.
To modstande i serie er en spændingsdeler.
En spændingsdeler gør, i et modstandskredsløb, en stor spænding til en mindre.
Ved at bruge to modstande i serie, kan der skabes en udgangsspænding som er en brøkdel af indgangsspændingen.
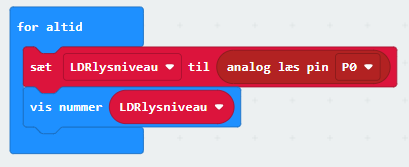
Kodning:
Ved at oprette en variabel, her "LDRlysNiveau", kan værdien vises.
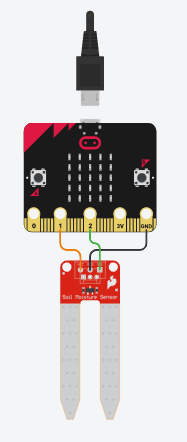
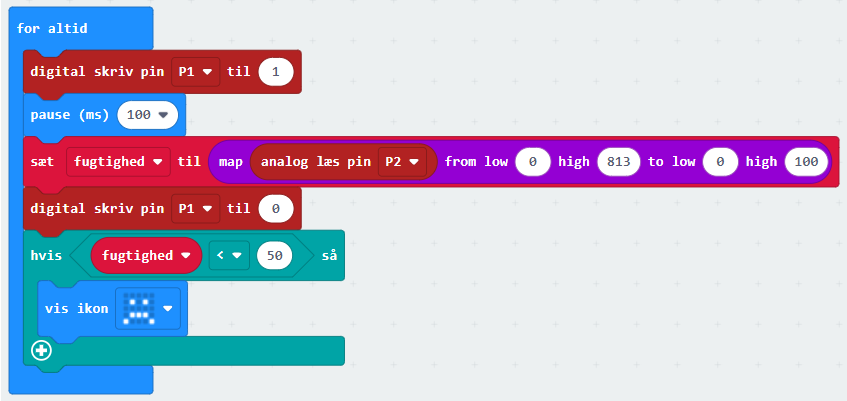
Jordfugtigheds sensor - Soil moisture sensor - Måler ledningsevne ud fra fugtighed.
Den gaffelformede jordfugtigheds sensor med to fritlagte ledere, fungerer som en variabel modstand.
Modstanden varierer i forhold til fugtigheden i jorden.
Des mere vand der er i jorden, des bedre ledningsevne og det resultere i en lavere modstand.
Des mindre vand der er i jorden, des dårligere ledningsevne og det resultere i en højere modstand.
OBS: At sensoren får tilført strøm mens den er i et fugtigt miljø, øger korrosionshastigheden betydeligt. Det anbefales derfor kun at tænde sensoren, når der skal aflæses.
Opsætning:
Vær generelt opmærksom på brug af vand nær elektronik.
De tre ben:
Power -Skal til pin 1. (Orange på billedet)
GND - Forbindes til jord. (Sort på billedet)
Signal - Skal til pin 2. (Grøn på billedet)
Kodning:
Lav en variabel med "fugtighed".
Map værdierne fra pin 2 til et interval mellem 1-100.
Det gøres ved først at aflæse hvor høj værdien er, når der måles i tørt jord.
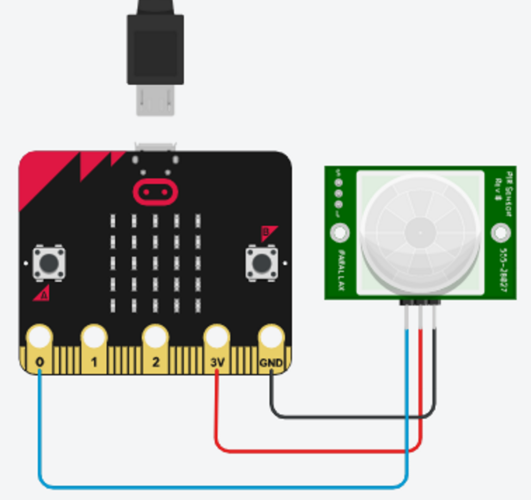
Bevægelses sensor - PIR sensor - Passiv Infra Rød sensor
PIR sensoren fungerer ved at have to registrerings områder, som er lavet af et materiale der er følsomt over for infrarød(IR).
Når sensoren er inaktiv, registrerer begge områder den samme mængde IR ud fra omgivelserne.
Hvis en varm krop som et menneske eller dyr kommer forbi, opsnappes det af den ene halvdel af PIR sensoren, hvilket giver en positiv differentialeændring mellem de to halvdele og igen omvendt når den varme krop forlader området, genererer området en negativ differentialeændring.
På siden er der to gule skruer hvor man kan justerer:
Sensivity Adjust - hvor sensitiv sensoren skal være i detektionsområdet mellem 3 og 7 meter.
Time Delay Adjust - hvor lang tid output skal forblive høj efter opdagelse af bevægelse.
Opsætning:
Signal - til pin 0. (Blå på billedet)
Power - til 3V. (Rød på billedet)
GND - til jord. (Sort på billedet)
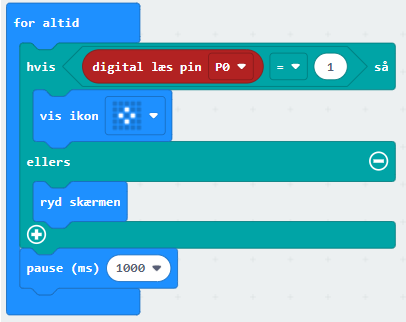
Kodning:
For at læse signalet bruges "digital læs"
Her opsat i en "hvis-ellers"-lykke.
Aktuatorer
Omhandlende eksterne aktuatorer. Aktuatorer gør noget. Typisk bruges "Digital skriv pin".
Aktuatorer gør noget og vil derfor være output.
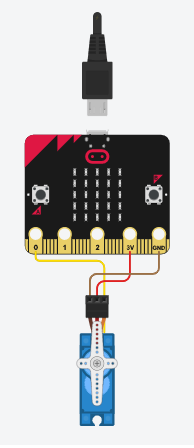
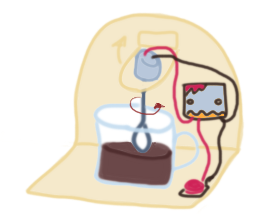
Servo motor
En servo motor er en type motor som kun kan roterer 180 grader.
Disse signaler får servo motoren fra micro:bitten, hvor man skriver til servo motoren hvilke grader den skal flyttes til.
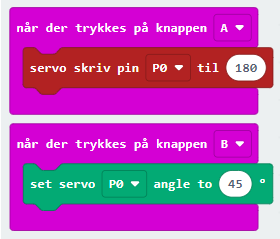
Der findes en Servo ekstention. Under Avanceret vælges udvidelser og søg på servo.
Ved søgning på "servo" kommer der også brugbare blokke frem.
Opsætning:
De tre ben:
Signal - her til pin 0. (Gul ledning på billedet)
Power - til 3V. (Rød på billedet)
GND - til jord. (Sort/Brun på billedet)
Kodning:
Alt efter om man blot søger på "servo" eller bruger en udvidelse, kan man ændre på servo'ens position.
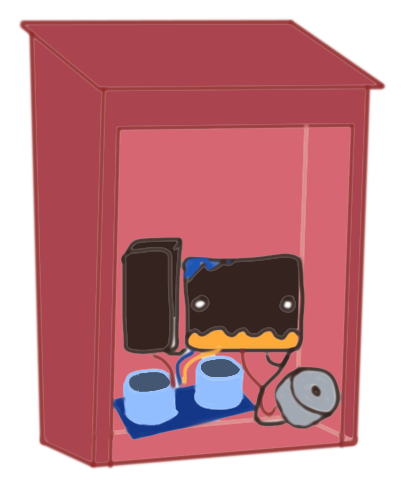
DC motor
Meget simpelt er en DC motor et modul der får en styrepind til at dreje rundt.
Hastigheden reguleres af spændingsmængden og kan kontrolleres med forskellige modstande.
DC motorens retning kan reguleres ved at ændre strømretningen, hertil kan man bruge en H-bro.
Man bør aldrig sætte en DC motor direkte til micro:bitten, for når man slukker motoren kommer der en elektronisk feedback som kan ødelægge micro:bitten.
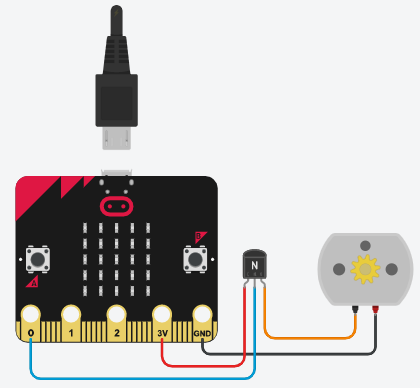
Herunder vises en simpel opsætning med en NPN transistor.
Opsætning:
Når man sender et HØJT signal til pin 0 vil transistoren åbne for strøm imellem collector og emitter, derved vil motoren tændes.
NPN transistorens 3 ben:
Collector - til micro:bit 3V (Rød på billedet)
Base - til micro:bit pin 0 (Blå på billedet)
Emittor - til DC motor terminal 1 (Orange på billedet)
Sidste forbindelse er fra DC motorens terminal 2 til micro:bit GND (Sort på billedet)
Kodning:
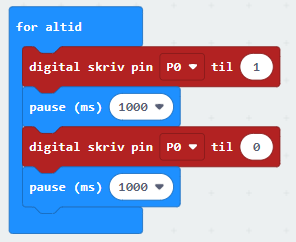
Her tændes og slukkes motoren med 1 sekunds mellemrum.
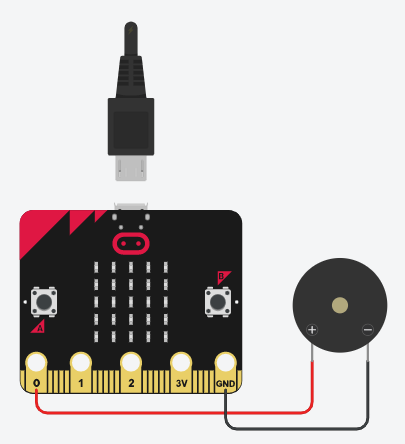
PIEZO Højtaler
Er blot to forskellige materialer der udvider sig forskelligt ved tilførsel af en elektrisk ladning, hvilket giver en lyd.
Så ud fra mængde og hastighed af ladningerne kan man påvirke lyden.
Opsætning:
Positiv (+) - til pin 0. (Rød på billedet)
Negativ (-) - til GND. (Sort på billedet)
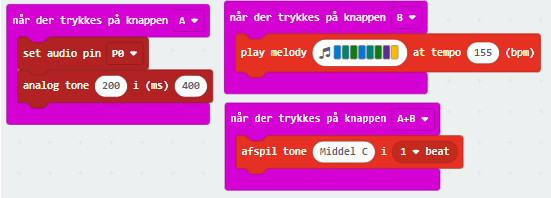
Kodning:
Der findes flere forskellige muligheder, så her er blot et udpluk.
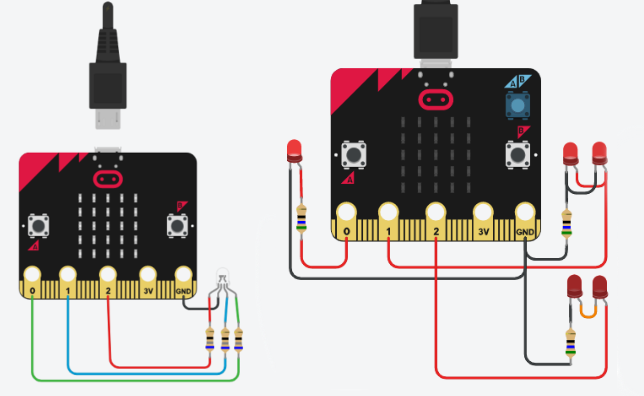
Lysdioder
Her er der taget udgangspunkt i 5mm Rød LED dioder og en 5mm RGB Diode -og med 0.02 Ampere.
Strømmen kan kun løbe en vej fra den positive anode til den negative cathode.
Der skal bruges en modstand, for ikke at overbelaste dioden.
Opsætning:
Modstandene er beregnet ud fra Ohms lov: U=R x I
Formodstanden = (forsyningsspændingen - spænding over diode) / Strøm
Formodstanden = (3V-2V)/0,02A = 50 Ω dvs. man skal minimum bruge 50Ω modstande, ellers findes nærmeste modstand med højere værdi.
LED dioder
56 Ω modstand er brugt.
På billedet ses der tydelig forskel på lys niveauet i forhold til om LED dioderne er sat i simpelt kredsløb eller parallelt -alle med samme modstand.
Simpelt kredsløb:
Her sidder LED dioder sammen med modstande og forsyningsspænding i en cirkulær kreds. 1. diodes cathode-ben forbindes til 2. diodes anode-ben sådan at strømmen løber fra positiv gennem dioden til negativ og så til positiv på næste diode.
Formlen i serielt kredsløb er:
I=U/(R1+R2+R3)
Parallelt:
Her deler LED dioder samme positive og samme negative forsyning.
Formlen i parallelkredsløb er:
I=U/R1+U/R2+U/R3
RGB diode
3x 68 Ω modstand er brugt.
Her er spændingen ens over de tre dioder og da micro:bitten leverer 3V og hver enkelt diode skal bruge 2V er der således ingen problem.
Men for at være sikker på at strømmen ikke foretrækker en vej frem for en anden, er det bedst at sætte en modstand i forbindelse med hver diode ben.
Det er særlig vigtigt når man blander de tre farver for at få andre farver.
Husk RGB-dioder bruger et additiv farvespektrum.
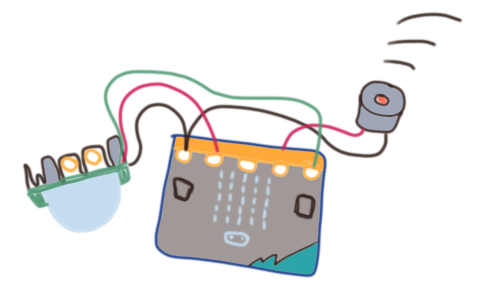
Kodning:
Billedet viser hvordan der tændes og slukkes for henholdsvis rød, grøn og blå lys på en RGB diode, opsat med rødt lys til pin 2, grønt lys til pin 0 og blåt lys til pin 1.
"Digital skriv" til den pin lysdioderne er forbundet til, enten tænder eller slukker lysdioderne ved HIGH/LOW eller 1/0.
For at få mere teknologiundervisning ind i grundskolerne er denne oversigt lavet med henblik på at give undervisere en hurtig og nem tilgang til basale viden om aktuatorer og sensorer der kan tilkobles micro:bit, så der i undervisningen løbende kan reflekteres eller findes resurser til at lave forskellige projekter ud fra en problembaseret tilgang.
Enhver anden brug af materialet til undervisningsforløb er selvfølgelig acceptabelt.
1. Problemafgrænsning / idegenerering.
Ud fra en gennemgang af de forskellige aktuatorer og sensorer, skal eleverne finde på et projekt med en sensor og en aktuator.
Tag udgangspunkt i noget de selv vil lave eller et problem de gerne vil løse.
Lav gerne BrainWritings øvelser, hvor eleverne bygger videre på andres ideer.
Brug "six thinking hats" som forskellige roller der skal finde på et projekt.
Afgrænsningen er 1 micro:bit, 1 aktuator og 1 sensor.
2. Tegn og forberedelse.
Projektet tegnes og der udføres eventuelt en lille model til at understøtte den rumlige forestilling.
Tegn et kredsløb og tegn prototypen.
Underviser bør godkende kredsløbet.
3. Sammensæt elektronik.
Ud fra tegnede kredsløb bør elektronikken nu kunne sættes op. Husk uden strøm!
En god ting er at teste via kode om opsætningen virker.
4. Byg prototyper.
Byg prototyperne og sæt elektronikken sammen med prototypen.
5. Test - evt. produktudvikling.
Virker elektronikken og kodningen? Er der fejl og mangler?
Hvordan virker koden?
Evaluer med klassen/grupper/eleverne.
Fejl og at tingene ikke virker kan give store frustrationer og ødelægge ellers gode projekter og ideer. Vær åben for der er ting der ikke altid lykkes og skab en god energi til at prøve at finde ud af hvor fejlen er.
Er alle ledninger rigtig forbundne?
Er der strøm?
Vender lysdioder rigtigt?
Brug et multimeter til at tjekke strøm rundt i kredsløbet.
Tjek om pins er sat til det rigtige ben osv.
Flere af tingene kan give mulighed for at relaterer til anden undervisning.
Videnskabs historie, Ohms lov, FN's verdensmål blandt andet.
Prøv at få eleverne til at lave et projekt de vil lave, da de derved er mere motiverede.
Problemløsning, projektstyring, teknologi, logisk tænkning, fysisk interaktion, fysiske begreber mm.
En frivillig forening der tilbyder teknologiske fritidsaktiviteter
Lorem ipsum dolor sit amet, consetetur sadipscing elitr, sed di am nonumy eirmod tempor invidunt ut labore et dolore magna aliquyam erat, sed diam voluptua. At vero eos et accusam et ju sto duo dolores et ea rebum. Stet clita kasd gubergren, no sea
Siden opdateres af interesserede studerende, bruges i forbindelse med forskellige forskningsprojekter eller til at udgive bachelorprojekter. Siden drives af frivillige kræfter.